
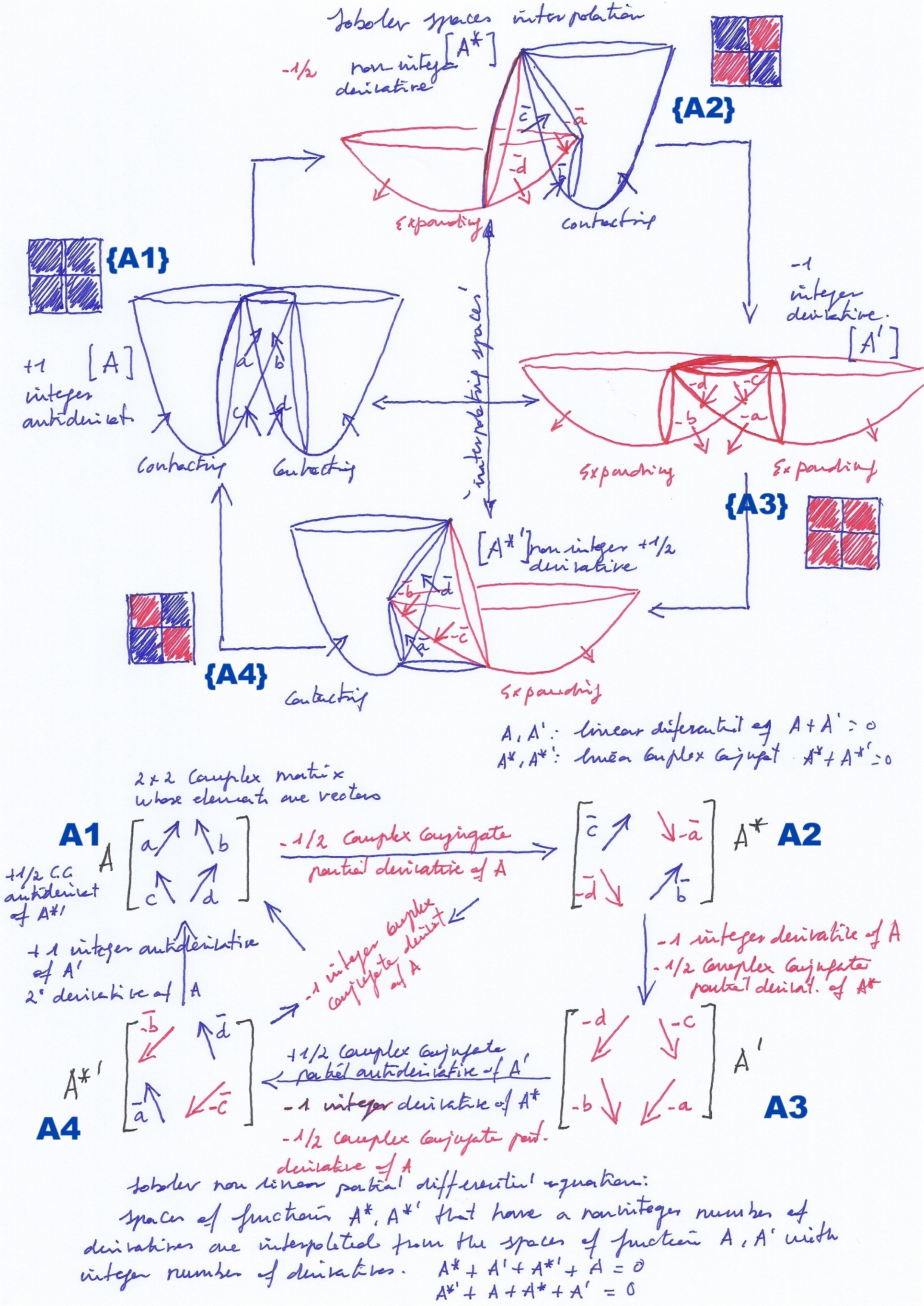
Let A1 be a 2×2 complex matrix.
That is the way that mathematicians like to start their writings, letting a thing be something else. However, you must be warned that not only am I not one of them but also I have no idea about mathematics. If you still want to keep reading, I will tell you furthermore that this blog is quite speculative and it will likely have some inexact statements. I hope you also will find something to think about.
Let each of its four complex elements be a vector represented in the next way:
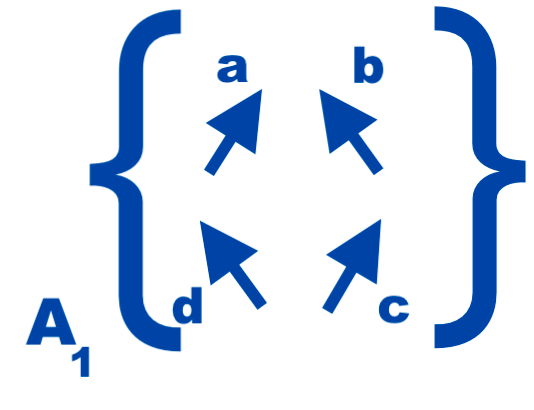
That’s a 2×2 complex vector matrix I named A1. It’s 2×2 because it’s divided in four parts by the X and Y axis and it has four variables represented by vectors on the four complex Z coordinates. I added a letter to each vector to show you more clearly how the vectors variate or remain invariant when performing on the matrix the next operations:
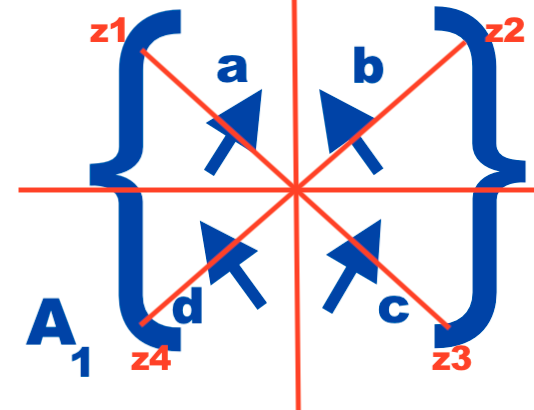
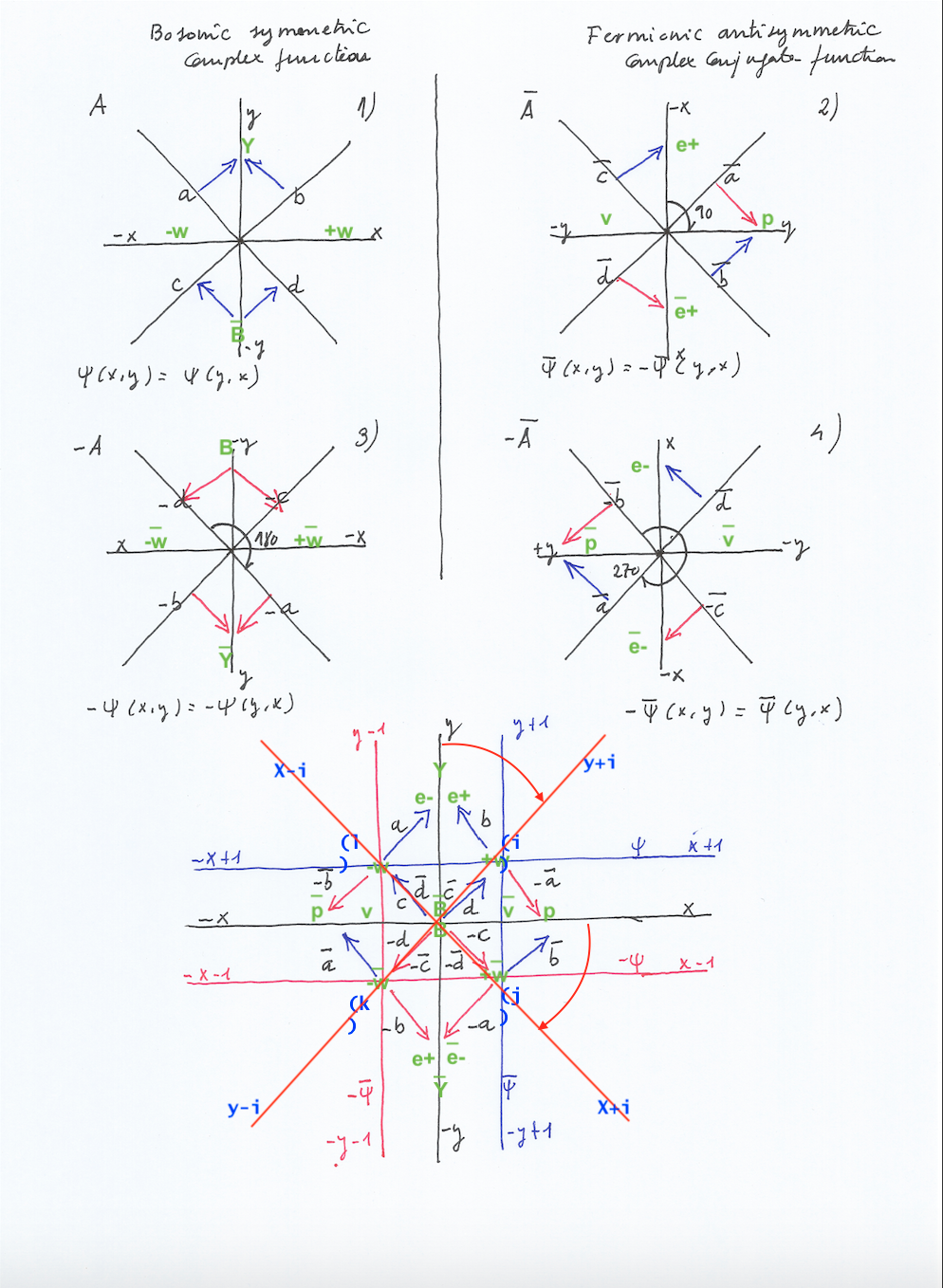
Rotating (or permuting) the four A1 vectors 90 degrees we perform on A1 the operation of complex conjugation:
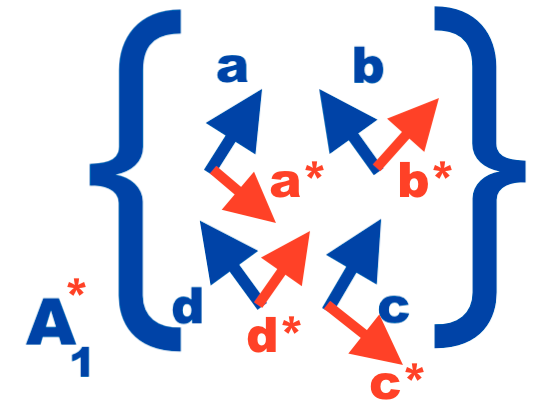
So, the rotated complex vector a* (in red colour) is «conjugate» of the non rotated complex vector a (in blue colour); b* is conjugate of b, c* of c, and d* of d.
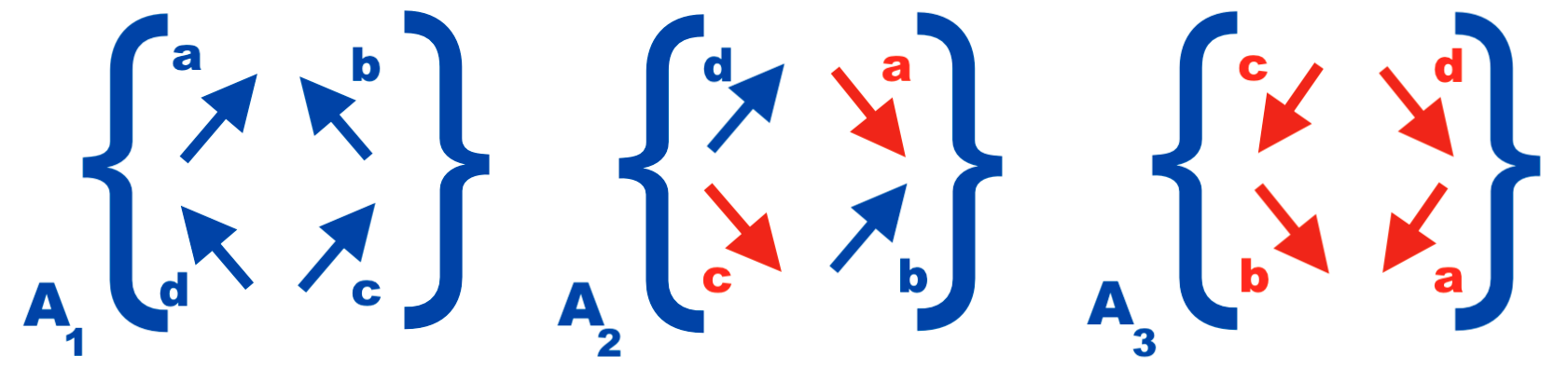
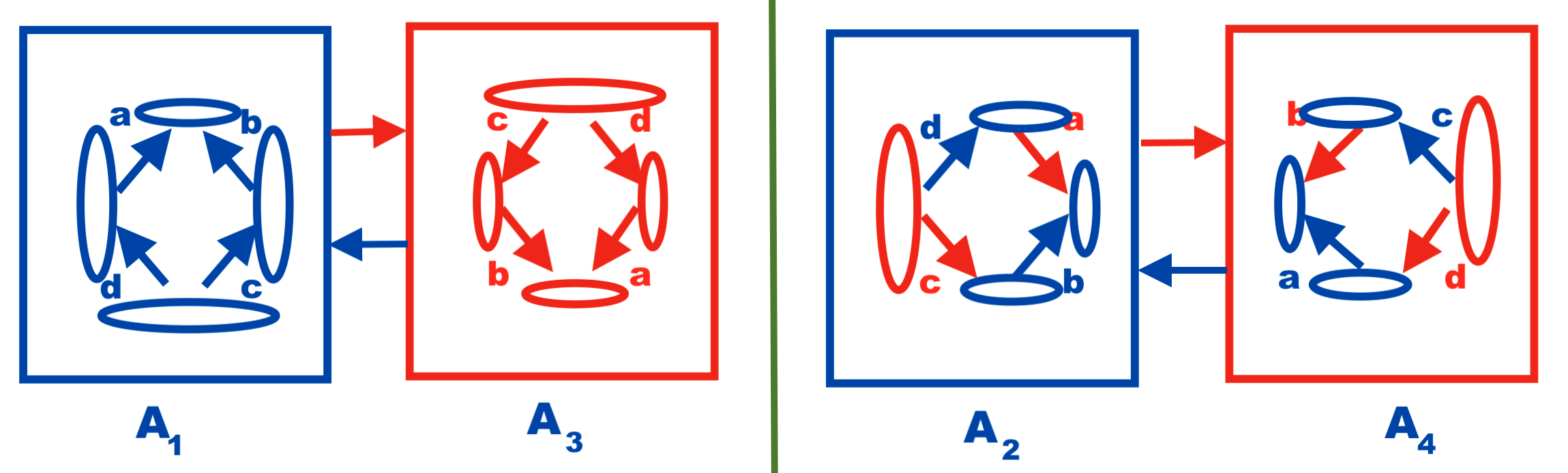
But let the vectorial permutations be caused by the 90 degrees rotation of the Z coordinates in this way:
On the above figure, A2 represents the conjugation of A1, but it also represents its actual transposition: it can be observed that a(A1) vector remains invariable when being replaced by d(A2); b(A1) gets inverted when being replaced by a(A2), c(A1) remains invariable as b(A2); and d(A1) gets inverted as c(A2).
The transposition of A1 implies the inversion of b(A1) and d(A1) in a(A2) and c(B2).
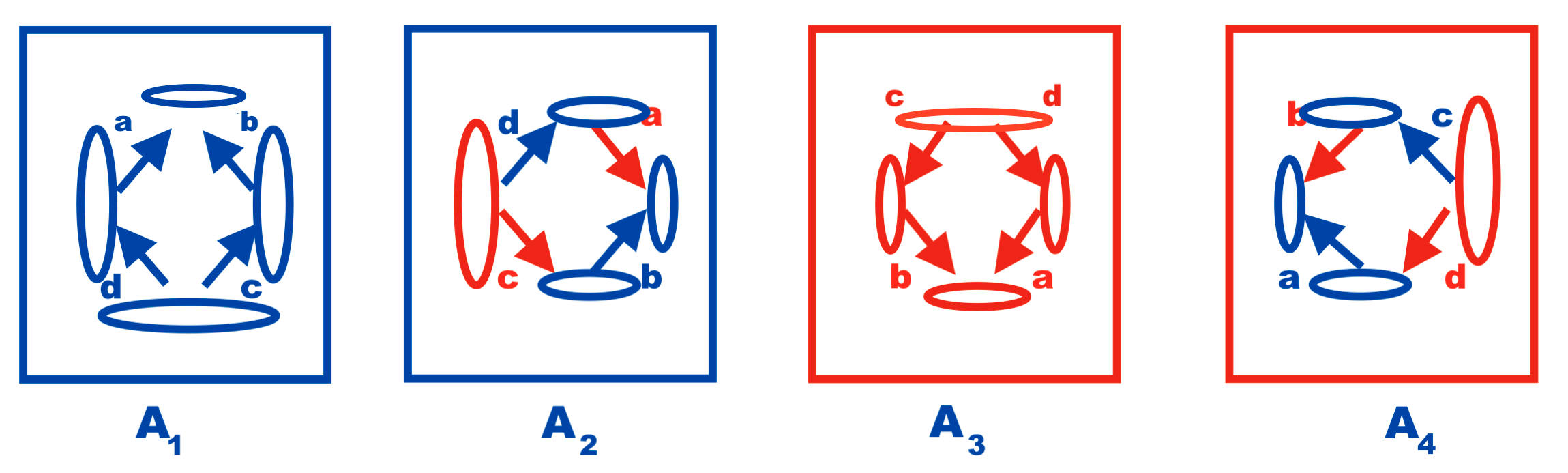
As those vectors are identified by letters we know that all the vectors have been permuted. But if we removed the letters, we would only perceive on A2 a variation of 1/2 A1 matrix while the other 1/2 A1 part would appear invariable.
If we removed the letters a, b, c, d from the matrix we will perceive that only half of its elements have varied, changing their sign. The other two elements will appear invariant or «constant»:
Let’s perform now the conjugation of A2 rotating again 90 degrees the z coordinates to form the A3 matrix. c(A3) is the conjugate of c(A2), d(A3) is the conjugate of d(A2), etc. But it also can be observed that A3 represents the inversion of the four vectors of the initial A1 matrix. Each positive A1 vector changes its sign becoming negative at A3:
Rotating 90 degrees the A3 vectors, we get their conjugation at A4. A4 also represents the inversion of A2 and the inverse transposition of A1:
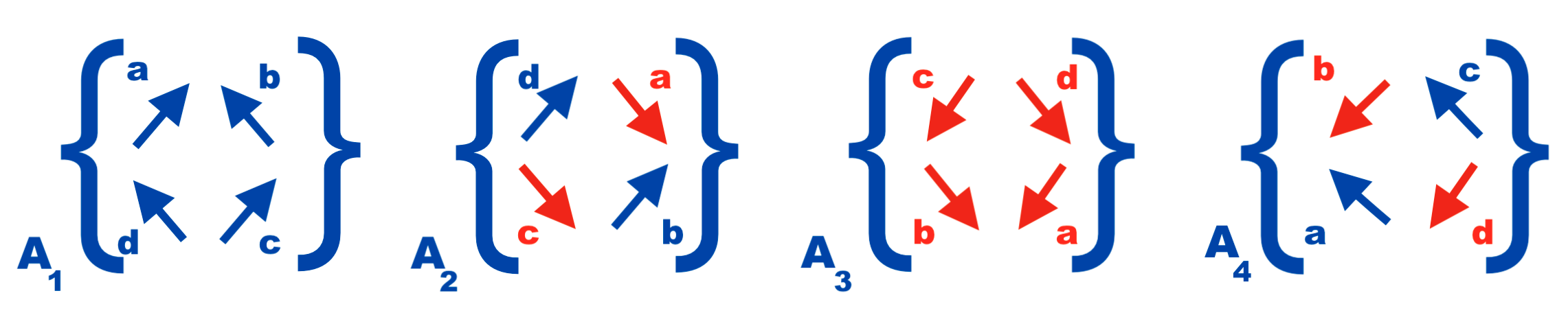
Finally, rotating A4 90 degrees to complete a whole 360 degrees rotation, we will see that A1 represents the the whole inversion of A3.
The A1 matrix and its rotational development through time can also be thought in terms of functions and equations.
When it comes to functions, each of those vectors can be interpreted as a line that is tangent to a curve:

At A2 only half of the tangents will be variable with respect to A1, getting inverted their slope, while half of them will remain constant.
In that sense, it can be said that A2 contains a non integer number (1/2) of derivatives: aA2 is a derivative of bA1, and cA2 is a derivative of dA1. a(A1) and c(A1) remain constant at d(A2) and b(A2) respectively.
In that sense, the complex function A1 is partially differentiable in its conjugate function A2.
Notice that, here, the term «differentiable» turns out to be synonym of «distinguishable».
A3 contains an integer (whole) number of derivatives with respect to A1: The inverted slope of d(A3) is a derivative of b(A1), a(A3) is a derivative c(A1), b(A3) is a derivative of d(A1), and c(A3) represents the derivative of a(A1).
A4 contains an integer number of derivatives with respect to A2, and a 1/2 number of anti derivatives with respect to A3. If we call «integrals» to the «antiderivatives», it can be said that A4 contains the 1/2 integrals of A3 and the whole derivatives of A2.
If A1A3 are complex functions, A2A4 are their conjugate solution.
Finally, A1 contains the 1/2 conjugate integrals of A4 and the whole integrals of A3.
Thinking in terms of equations, each 90 degrees permutation to complete a 180 rotation of the system can be thought as the increment of an exponential degree. In that sense a(A2) will be the a^1 variable; a(A3) will be the a^2 variable; a(A4) will be the -a^1 variable; and a(A4) will be the -a^1 variable.
(I think A4 and A1 would not represent a 3º and 4º exponential respectively to form a quartic polynomial because their increment represents a decrement).
So we have a 2 degree equation with 4 variables and 4 constants (a, b, c, c):
A2 + A3 + A4 + A = 0
But we also have two 2 degree equations with 4 variables (a, b, c, d):
A^2 + A^4 = 0
A^1 + A^3 = 0.
The order of those equations is given by the order of their derivatives. In this sense I think it can be said that:
A3 contains an integer number of derivatives with respect to A1 formed by the addition of two non integer number of derivatives (the partial 1/2 derivatives of A2 with respect to A1 and A3 with respect to A2); and A1 contains a whole number of of antiderivatives with respect to A3 formed by the addition of two partial antiderivatives (the 1/2 antiderivatives of A4 with respect to A3 and A1 with respect to A4).
In that sense, A1+A3 represents a first order complex differential equation of degree 2.
And A2+A4 represents a first order complex conjugate differential equation of degree 2.
I speak here about «first» order because on A3 there has been only one complete derivative of A1 (and on A4 there’s only one complete derivative of A2).
Each complete derivative is formed in those cases by the addition of two partial 1/2 derivatives. A 1/2 derivative of degree 1 and a 1/2 derivative of degree 2.
And A1+A2+A3+A4 is a second order differential equation of degree 2. It’s a second order equation because it implies two order derivatives, the complex one given by A1A3, and the conjugate one given by A2A4.
A1+A3 and A2+A4 would be a lineal equations while A2+A3+A4+A1 would be a non linear equation.
But the complex A1A3 equation and its conjugate solution A2A4 cannot be considered as independent equations separate of each other, because to form A3 we necessary need to pass through A2. And to form A4 it’s mandatory to pass through A3.
So, to form A2+A3+A4+A1=0 we need to interpolate the complex conjugated function in between of the complex function.
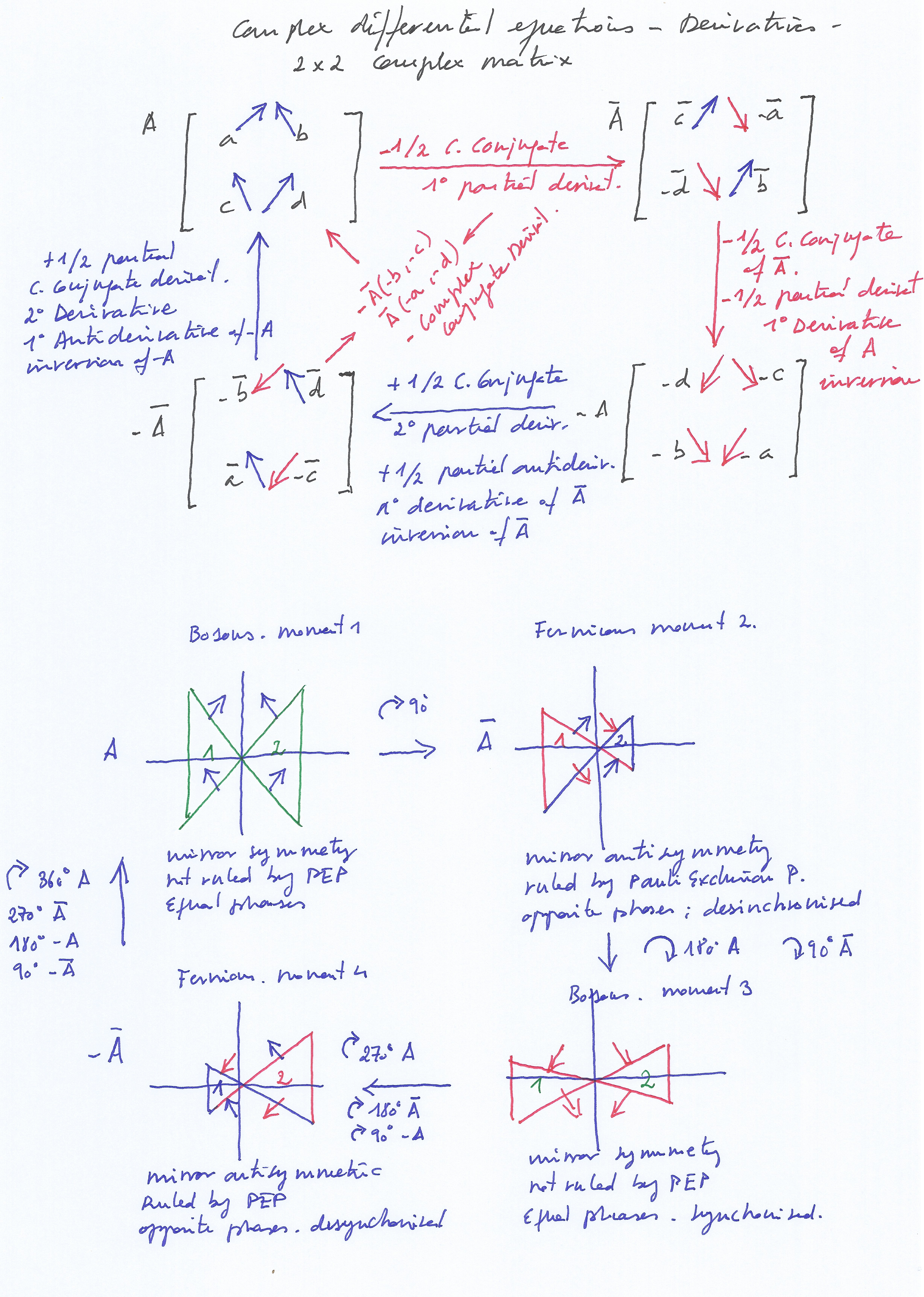
Now, let’s provide a physical context to the vector matrix A1 and its evolution through time, considering that the mentioned vectors represent pushing forces caused by vector (they call it «Hilbert») spaces that vibrate.
Those vibrating spaces can also be thought in terms of «strings», why not?:
The vibration of the strings will occur by expanding and contracting them periodically. In that context, two converging vectors will imply a string that contracts, while two diverging vectors will imply a string that expands.
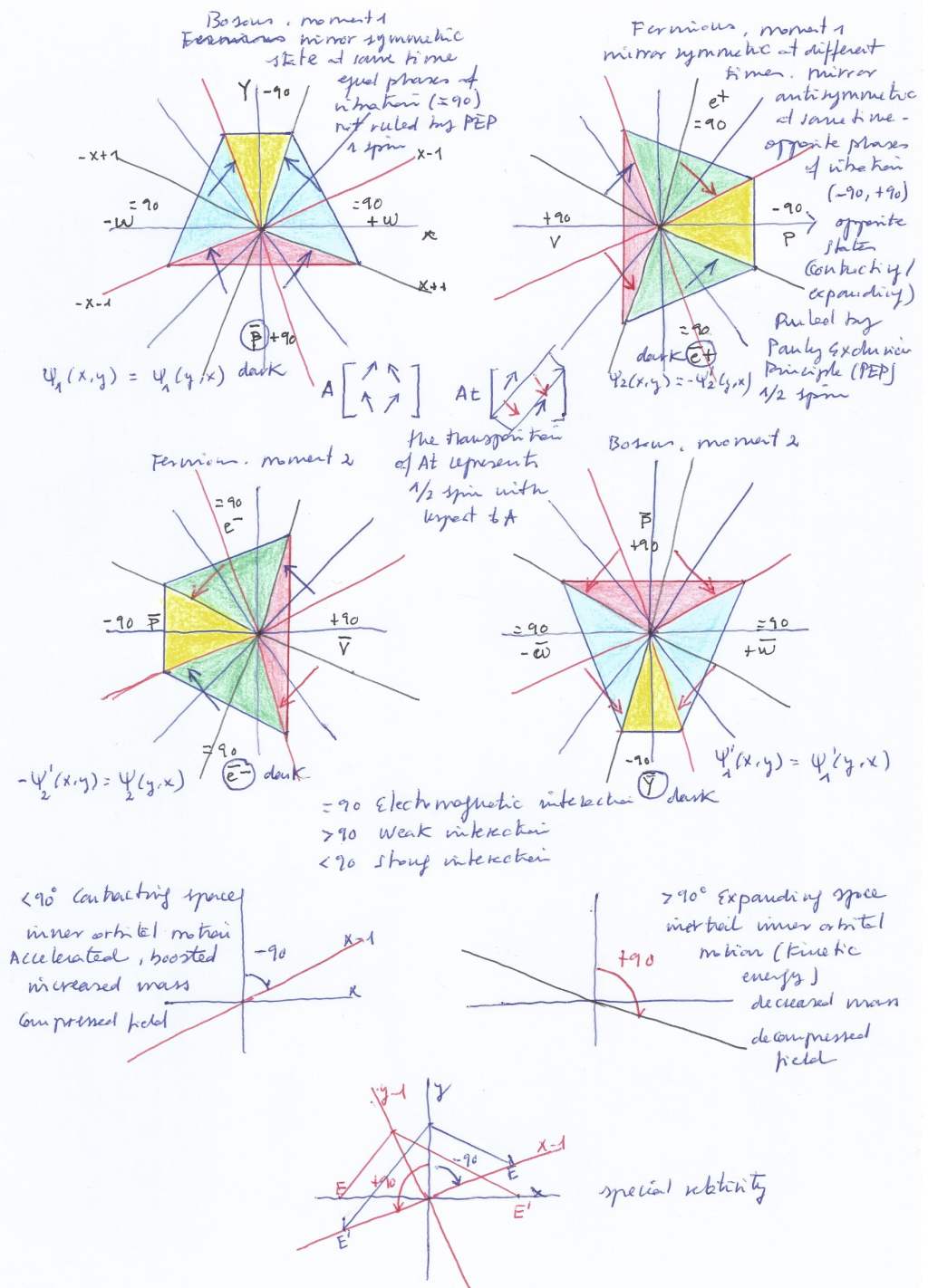
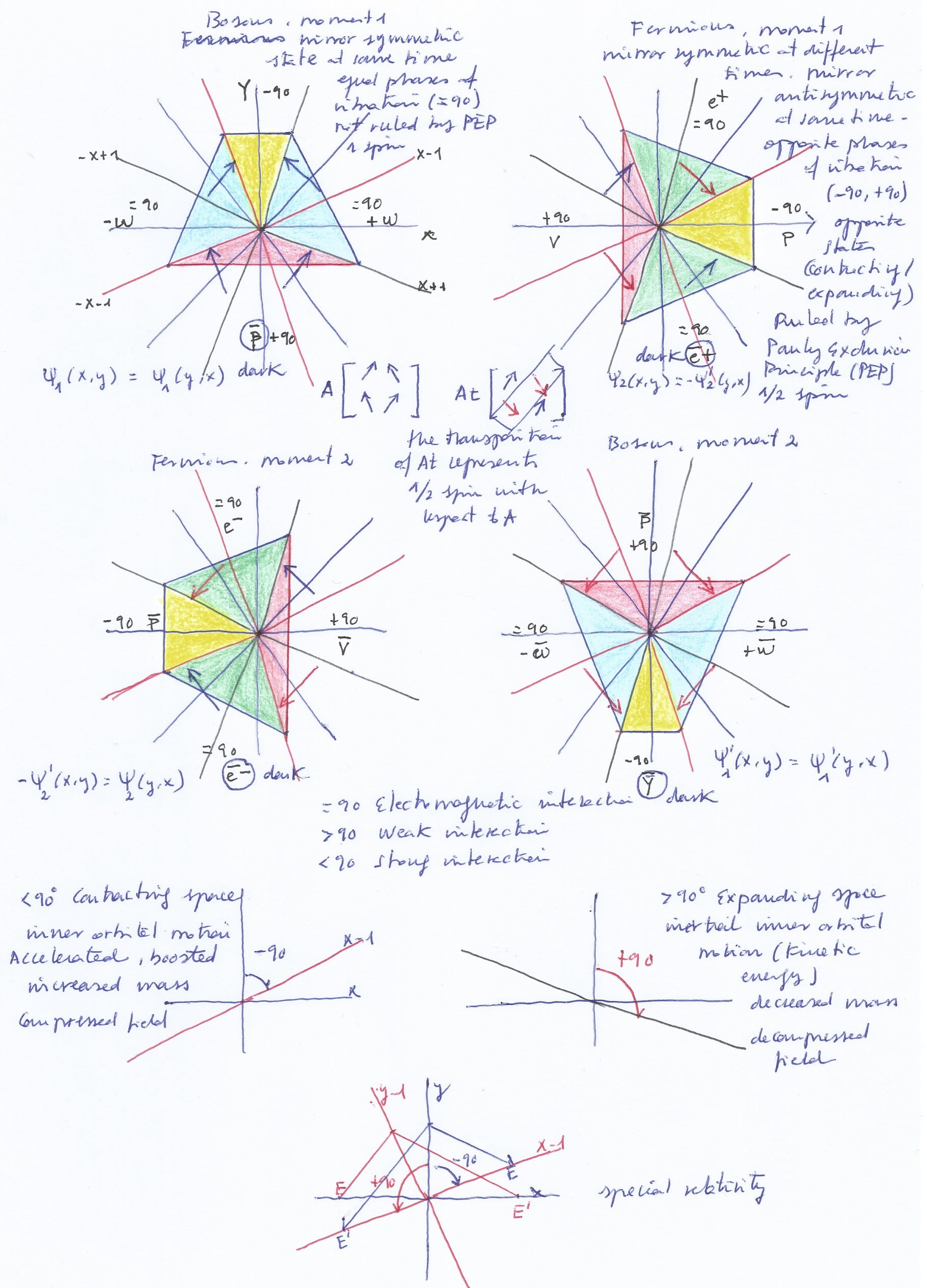
In that sense we will have two separate systems of four strings: the system A1A3 where the transversal strings simultaneously vibrate with a same phase, being mirror symmetric of each other at a same moment; and the system A2A4 where the transversal strings vibrate with an opposite phase, being mirror antisymmetric of each other at a same moment.
If the strings do not vibrate but they are part of a system that rotates, then the evolution of the whole system could be described by two separate equations or independent functions, it will be necessary to combine or to interpolate the complex equation and its conjugate solution:
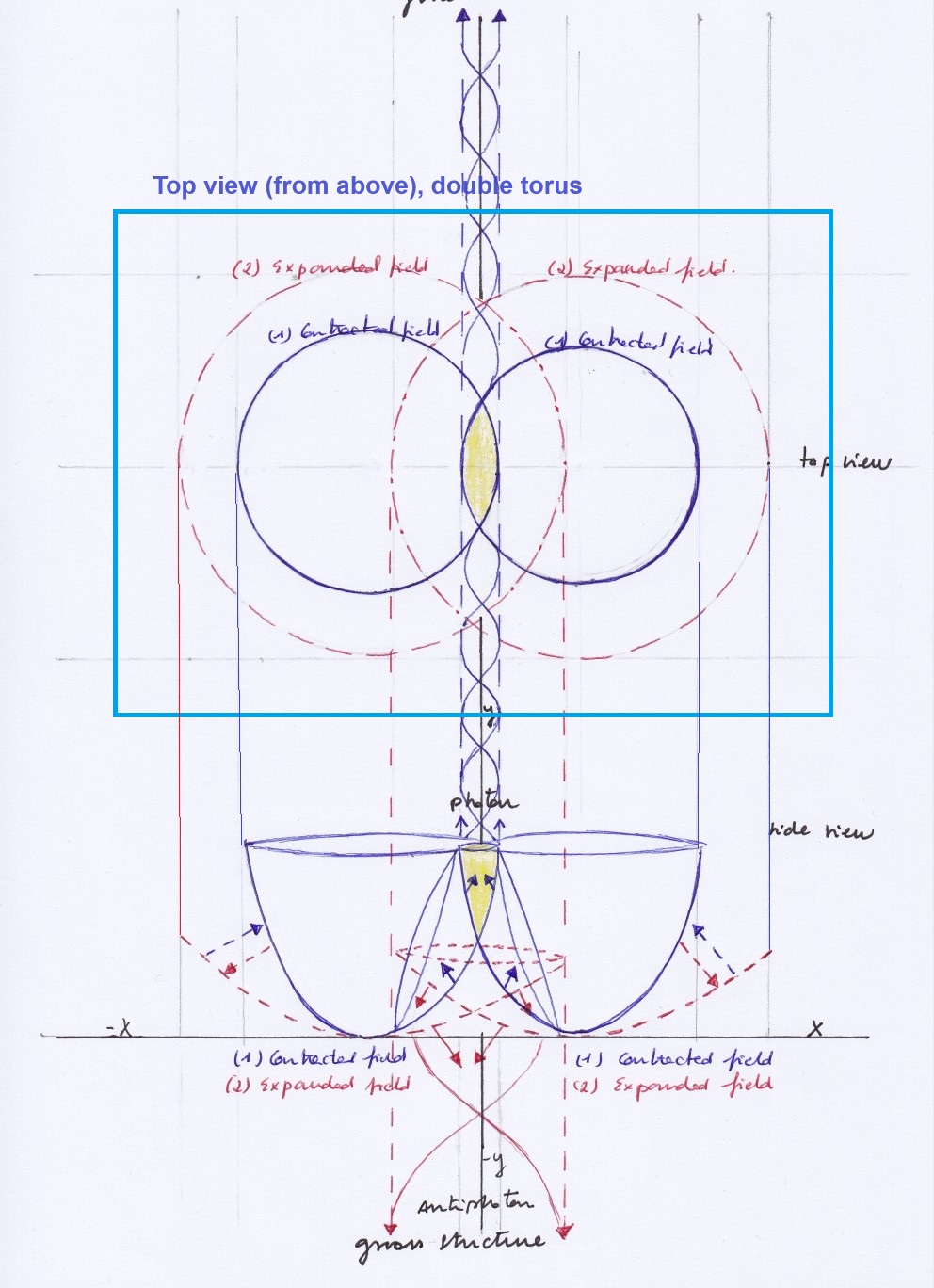
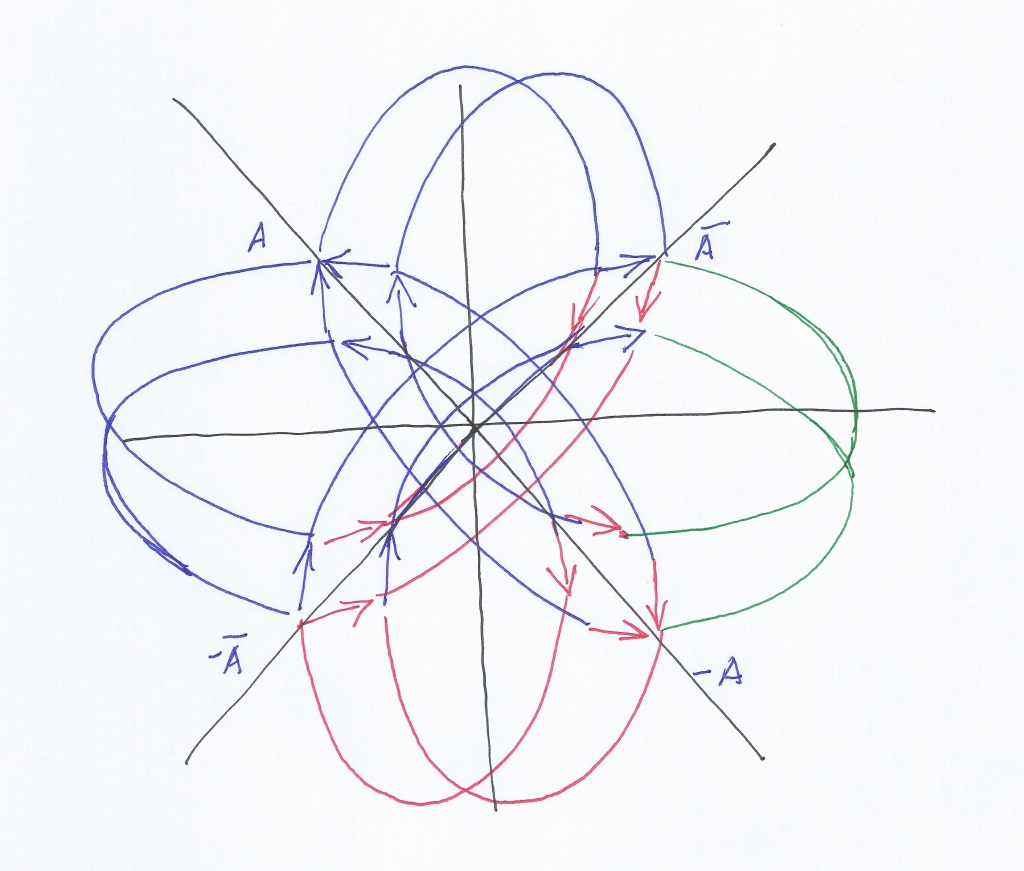
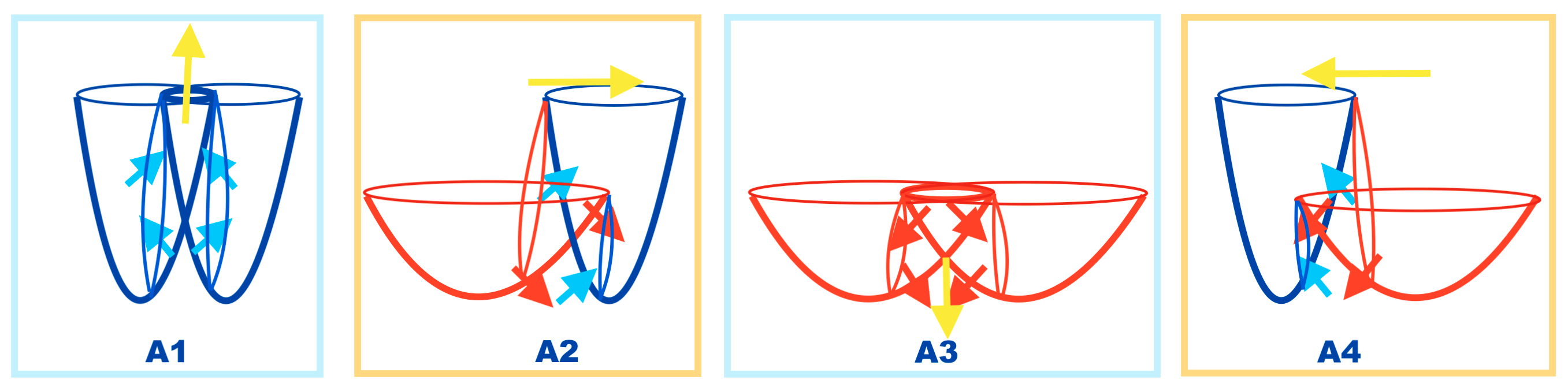
If instead of strings we think in terms of topological spaces, we can naturally arrive at a composite model of two types of spaces and subspaces:
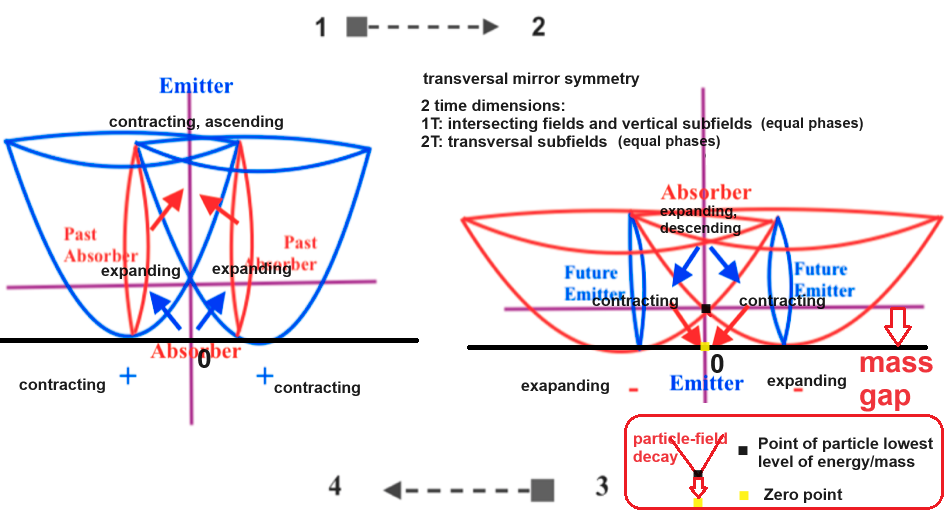
First: A system of two intersecting spaces vibrating with a same phase will form a shared nucleus of two transversal and two orthogonal subspaces whose physical properties (inner kinetic motion and inertial mass) and shape are determined by the pushing forces (carried by the vectors described by A1+A2) caused by the displacement of the intersecting spaces while vibrating:
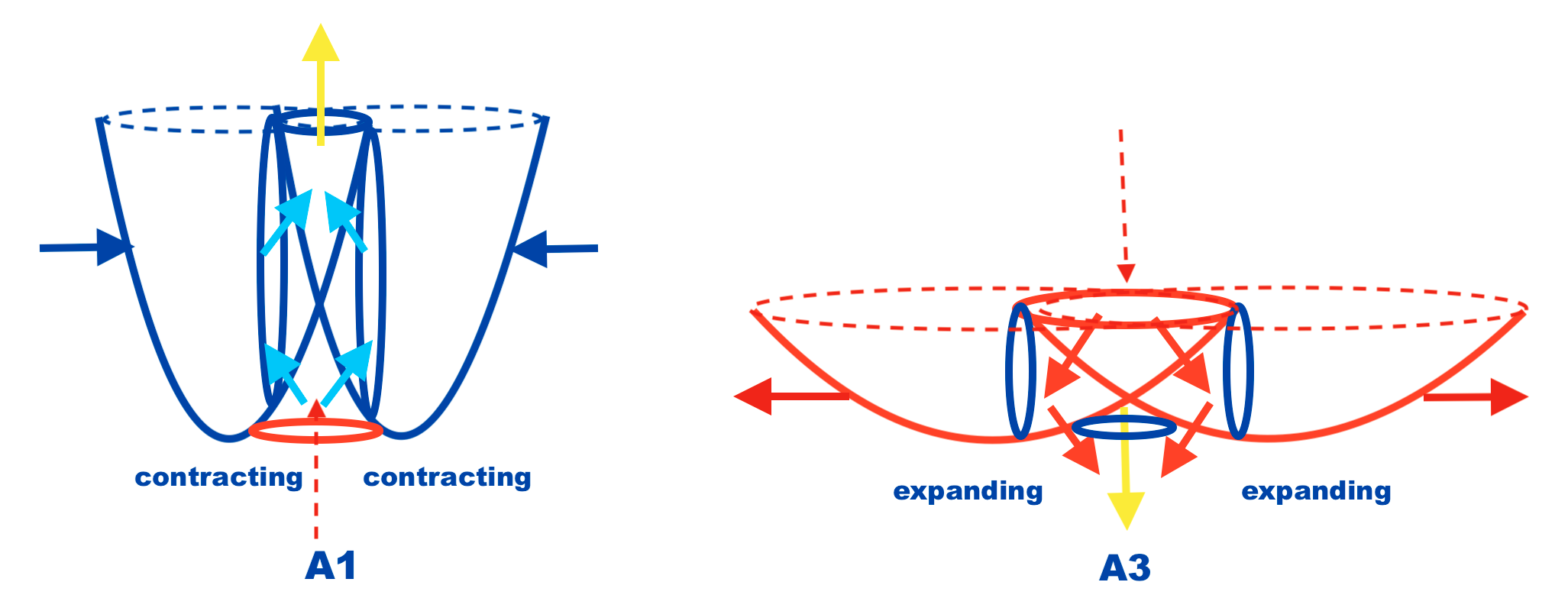
Second: A system of two intersecting spaces vibrating with an opposite phase will form a shared nucleus of two transversal and two orthogonal subspaces determined by the pushing forces carried by the vectors described by A2+A3:
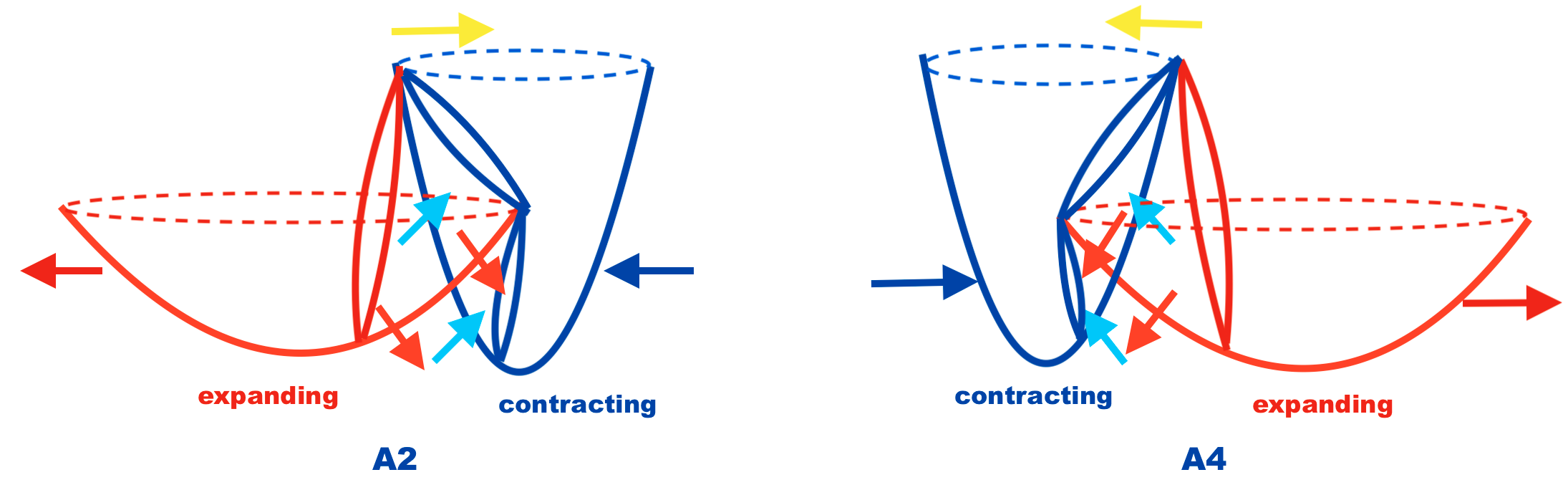
- The transversal subspaces in case of A2A4 are «ruled» by an exclusion principle in the sense that they cannot be in a same state (of being contracting or expanding) at a same moment. This «exclusion» principle operates then at a mirror level as it’s obvious that the left subspace cannot materially be, at a same moment, at the right handed side of the system. The exclusion principle occurs because the left and right subspaces are mirror antisymmetric.
If we spoke here in terms of «superposed» states of the left and right transversal subspaces, we would only do it in a broad way, always in terms of mirror symmetry: those subspaces are not physically superposed, and their states are not actually either.
- The transversal subspaces in case of A1A3 are not ruled by that exclusion principle, because they can be in the same state (of being contracting or expanding) at a same moment because they are mirror symmetric.
If the above mentioned subspaces represented the subatomic particles of the atomic nucleus on a quantum field model, the subspaces ruled by the exclusion principle would be fermions while the subspaces not ruled by the exclusion principle would be bosons.
The currently accepted atomic model known as «quantum mechanics» (and its several probabilistic interpretations) states that there are two kind of separate type of subatomic particles: fermions, are ruled by the Pauli Exclusion principle following the Dirac Fermi statistics, and bosons which are not ruled by the Pauli exclusion principle and follow the Bose Einstein statistics.
Bosons are probabilistically described by the Schrodinger equation, which is a linear partial complex differential equation and, independently, fermions are probabilistically described by the conjugate solution of that same Schrodinger equation.
But the Schrodinger equation has the particularity that it is a first order equation in time but a second order equation in space. Do you know what that means?
String theories propose the existence of «supersymmetric» particles that would be those that would link the two kind of fermionic and bosonic particles reaching or preserving the nuclear symmetry through time. They found a theoretical base to propose their existence by means of highly sophisticated mathematical developments, and those predicted supersymmetric bonding particles have been desperately looked for by increasingly bigger and more and more powerful particles accelerators getting no results so far.
It seems to be quite unorthodox and irrelevant, it seems, to propose instead that fermions and bosons are not two kind of independent spaces (or fields, or strings, or branes, or whatever they speculate the subatomic particles are) but topological subspaces of a composite system of vibrating spaces that get transformed through time acting periodically as fermions or bosons depending on the equal or opposite phases of vibration of the spaces whose interaction (by means of their intersection or partial merging) determine the nucleus that those bosonic or fermionic subspaces would constitute.
Acting as bosons they would be described by the complex A1A3 equation; acting as fermions they would be described by the conjugate A2A4 equation.
In that unorthodox context, it can also be thought that the phases of vibrating of the intersecting spaces (whose intersection form the shared atomic nucleus) synchronize and desynchronize periodically. Ando so, to describe the evolution of its nuclear subspaces through time it would not be enough a single equation of order 1.
But we can ask ourselves what would it happen if that composite system additionally rotated?
We see that rotating that topological system we get the same evolution, or differentiation through time, of the four vectors of matrix A1 that we describe when performing the operations of complex conjugation, transposition and inversion.
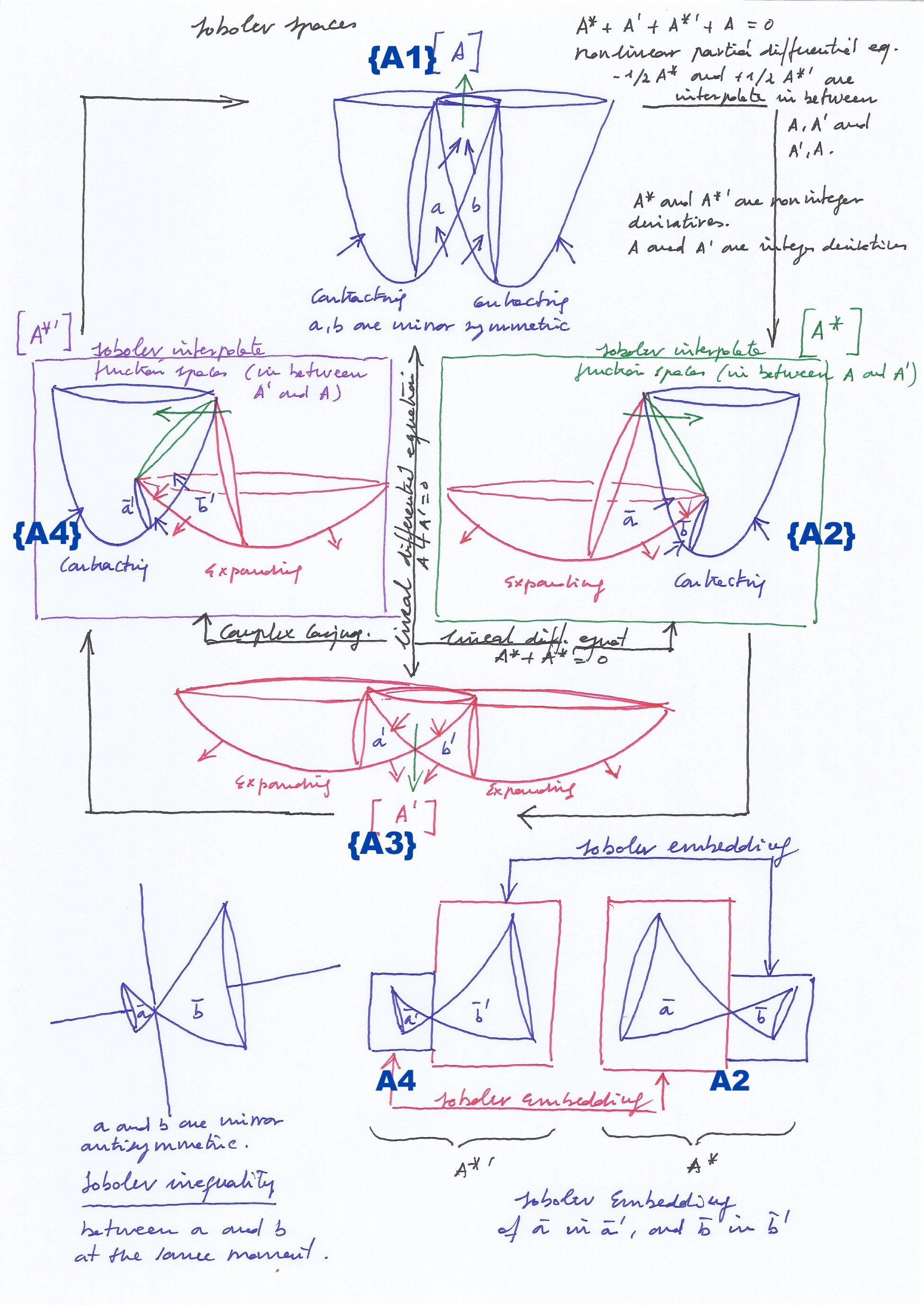
To be able to describe through time the vectorial pushing forces of a rotational system of this kind it we would be then necessary to interpolate the complex equation A1 + A3 and its conjugate solution A2 + A4.
That implies the necessity of interpolating functions that have a non integer number of derivatives (weak derivatives), as the partial 1/2 derivatives of A1A2 or A3A4, with functions that have an integer number of derivatives («strong» or whole derivatives), as A1+A3 or A2+A4.
I think these kinds of interpolations of functions would be related to Sobolev spaces where interpolation of spaces is considered: https://en.wikipedia.org/wiki/Interpolation_space
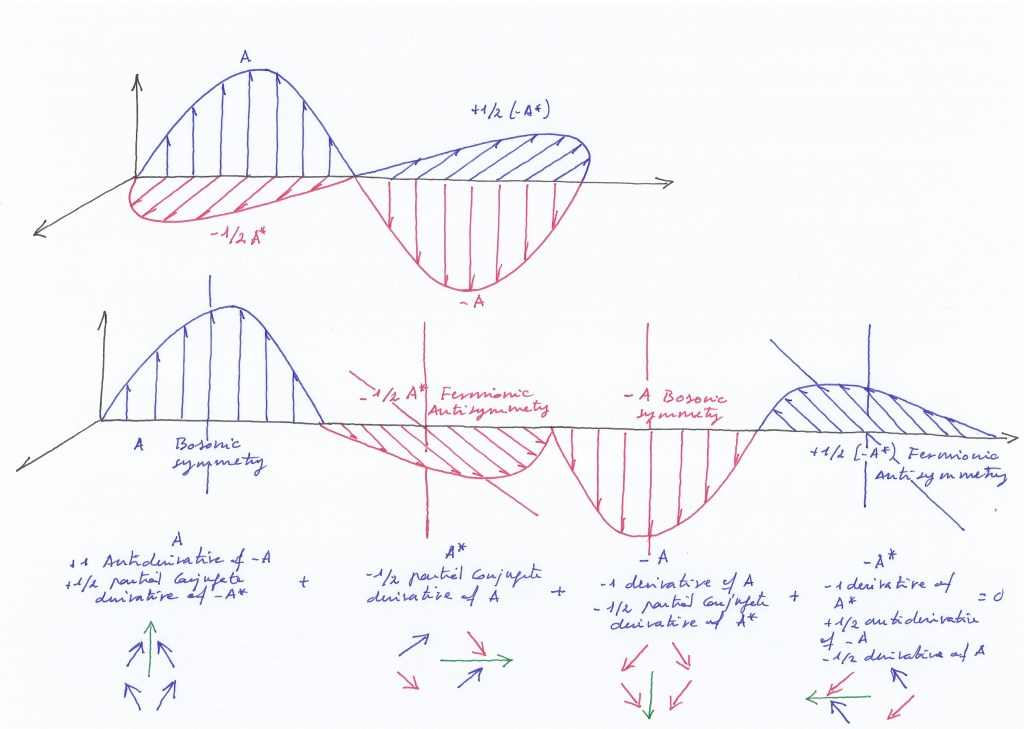
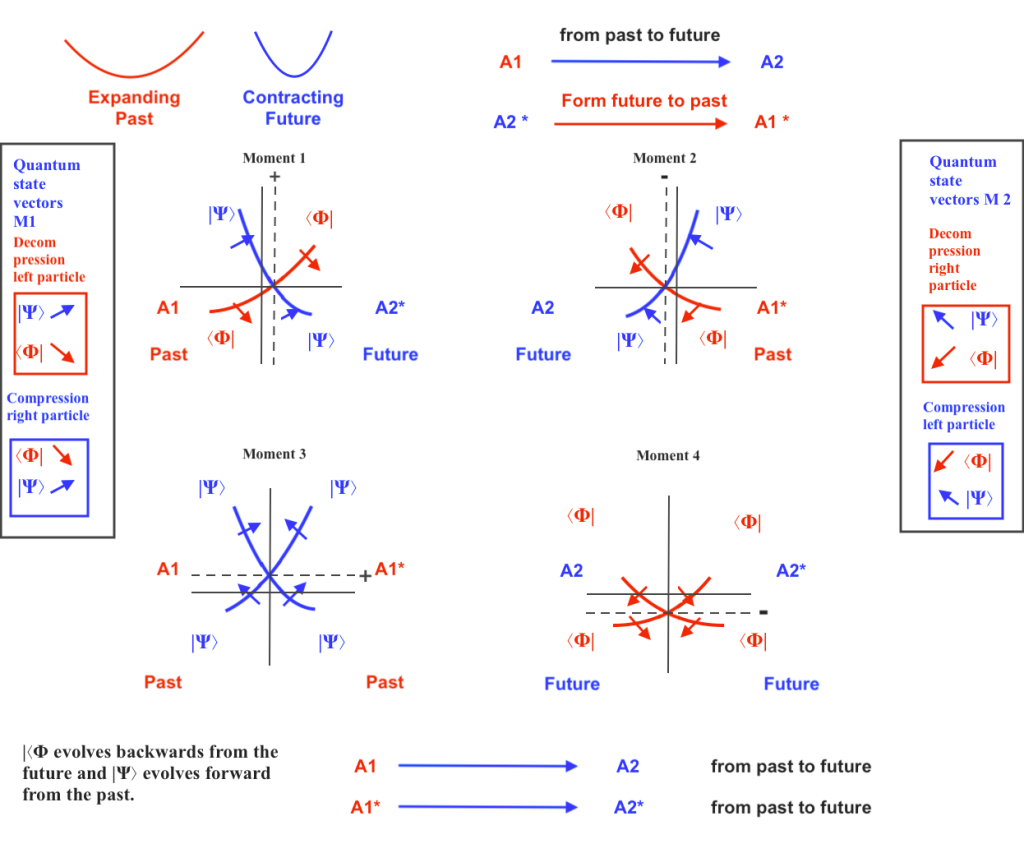
The continuous (as not interrupted) variation of a pulsating wave that expands and contracts can be described as a classical wave by a 1º order equation or a linear function.
But when it comes to a pulsating composite system of spaces and subspaces that rotates, its variation is going to appear as something discontinuous because of a linear function cannot describe the whole evolution of the system through time.
An interpolation of two linear functions will be needed to describe that topological system:
The same can be represented in this way:
Or in this another diagram:
I think these ideas could also be related to the so called «Bäcklund transform».
A Bäcklund transformation is «a system of first order partial differential equations relating two functions». «It implies that the two functions separately satisfy partial differential equations, and each of the two functions is then said to be a Bäcklund transformation of the other». See the Wikipedia article here: Bäcklund transform.
«The prototypical example of a Bäcklund transform is the Cauchy–Riemann system.
In the Cauchy- Riemann system, «a Bäcklund transformation of a harmonic function is just a conjugate harmonic function».
The mention to Backlund transform is the only new information I added on this post with respect to my previous posts on this blog about differential equations in the context of atomic physics. It has been a year since then. But I think this post could be more clearly understood that the previous ones.
Finally I also wanted to mention an interesting link that Santiago, a good friend of this blog, sent me about Hegel’s dialectic and quantum mechanics.
It’s a conference in Spanish by Prof. Alexis Jardines:
I disagree with many statements prof. Jardines makes, but I found really interesting some Hegel’s ideas he mentions on the video. He gathered them in his book «El enigma del movimiento. Una interpretación de las relaciones espacio-temporales válida para los macro y los microprocesos: La Teoría del movimiento unificado».
Hegel’s dualism fits very naturally with composite models where mirror symmetry and antisymmetry rules a fundamental role. Mirror dualism is present everywhere in nature and it can be intuitively and logically deduced and rationally explained. But his ideas about the philosophy of nature are today considered as something quite peculiar, to say the less, by the scientific orthodoxy.
Maybe Hegel still has many things to teach them.
Have a great time.
(Note: as a free blog run on wordpress platform, wordpress Company sets some advertisements on it for their own benefit.)
